画像が歪んで見える…そんな疑問にカメラのキャリブレーションを教えます。
正確な測定や映像処理に欠かせないのがこの技術。
本記事では、カメラのキャリブレーションの基本から実装方法までをやさしく解説。
「よく分からない」を「なるほど!」に変えるヒントが満載です。
この記事を読むことでわかること
- カメラ キャリブレーションの仕組みと目的
- メリットと注意すべきデメリット
- 実際のやり方とステップ別の解説
- PythonとOpenCVによる実装方法
カメラのキャリブレーションの基本を理解しよう
カメラキャリブレーションは、レンズの歪みや位置ズレを補正し、正確な画像処理を実現するための重要な工程です。
特に産業用カメラやロボティクス、3D解析の分野では欠かせない技術です。
- キャリブレーションとはわかりやすく解説
- キャリブレーションのメリットとは?
- 実は注意が必要?デメリット
- 原理を図解で理解する
- やり方と手順を詳しく紹介
- なぜキャリブレーションが必要なのか?その理由とは
キャリブレーションとはわかりやすく解説

これにより、撮影された画像を実世界の座標系と一致させることが可能となり、正確な測定や3D再構築が実現します。
主にチェッカーボードやサークルグリッドといった既知のパターンを用いて、複数の角度から撮影し、OpenCVなどのライブラリを使用してパラメータを推定します。
この手法は、ロボットビジョンやAR、3Dスキャンなど、精度が求められる分野で広く活用されています。
キャリブレーションのメリットとは?
カメラキャリブレーションの主なメリットは、画像の歪みを補正し、正確な測定や3D再構築を可能にする点です。
これにより、物体の位置や距離を正確に把握でき、ARやロボットビジョンなどの分野での精度が向上します。
また、複数のカメラを使用するシステムでは、各カメラの位置関係を正確に把握することで、統合された視覚情報の取得が可能となります。
さらに、キャリブレーションにより、カメラ固有の内部パラメータ(焦点距離や光学中心など)と外部パラメータ(位置や姿勢)を取得でき、これらの情報は高度な画像解析や制御システムの基盤となります。
実は注意が必要?デメリット
カメラキャリブレーションには多くの利点がありますが、いくつかの注意点も存在します。
まず、キャリブレーション作業は専門的な知識と時間を要し、特に高精度を求める場合は手動での調整が必要となり、作業者のスキルに依存するため、精度にばらつきが生じる可能性があります。
また、ソフトウェアキャリブレーションでは、パソコンの出力を調整して色を変換するため、階調の減少や色つきが現れる場合があります。
さらに、ハードウェアキャリブレーションを行うには、対応するモニターや専用の測色器が必要となり、初期投資が高くなる可能性があります。
これらの点を踏まえ、キャリブレーションの導入を検討する際は、目的や予算、必要な精度を考慮し、最適な方法を選択することが重要です。
原理を図解で理解する
カメラキャリブレーションの原理を図解で理解するためには、ピンホールカメラモデルを基にした幾何学的な関係を把握することが重要です。
このモデルでは、3次元空間の点がカメラを通じて2次元の画像平面に投影されます。
この投影関係は、内部パラメータ(焦点距離、光学中心など)と外部パラメータ(カメラの位置と姿勢)によって定義されます。
キャリブレーションでは、既知のパターン(例:チェッカーボード)を様々な角度から撮影し、画像上の特徴点と実世界の座標との対応関係を解析することで、これらのパラメータを推定します。
このプロセスにより、レンズの歪みを補正し、正確な3D再構築や測定が可能となります。
やり方と手順を詳しく紹介
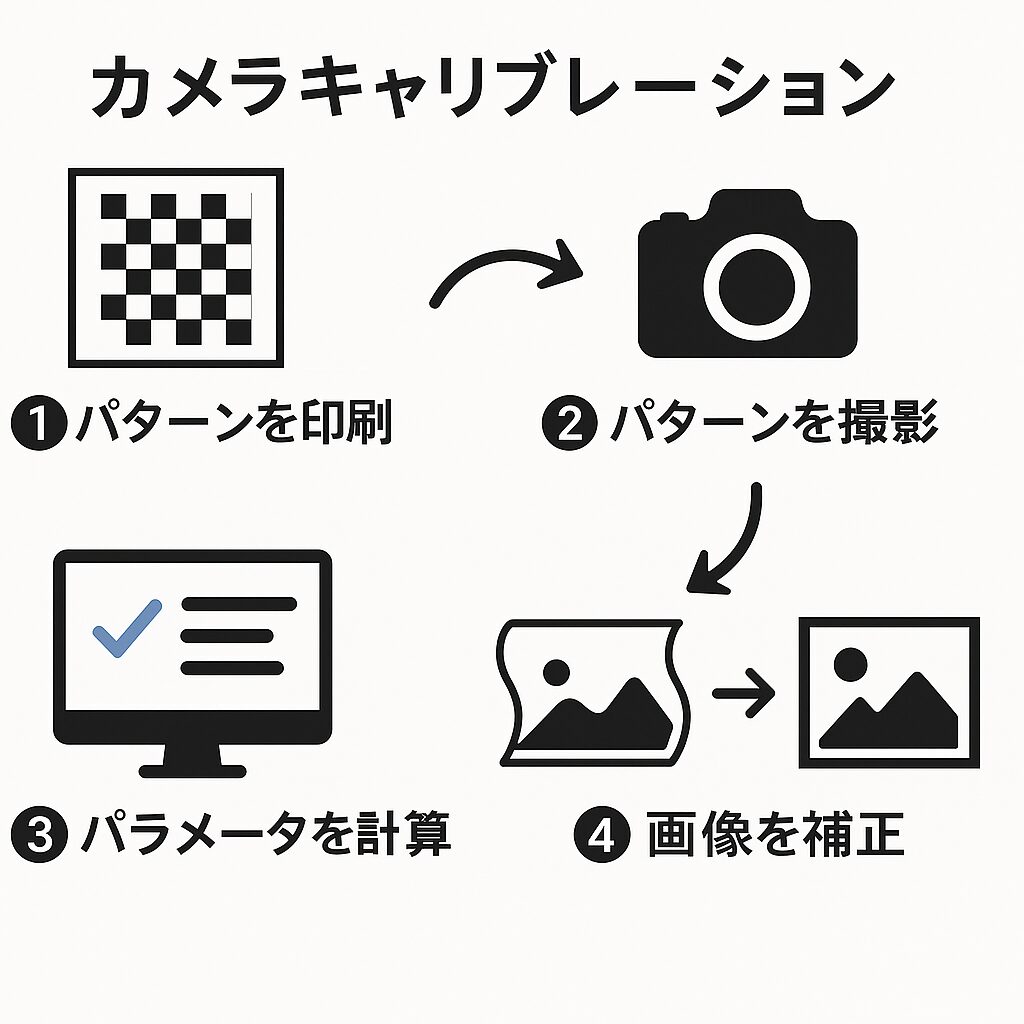
カメラキャリブレーションの手順は、以下のステップで構成されます。
カメラキャリブレーションのやり方は、まず「チェッカーボード」などの基準パターンを印刷し、それをさまざまな角度や距離から10〜20枚撮影します。
次に、ソフト(例:OpenCV)を使って、画像上のパターンの角を自動検出。
さらに、その検出結果と実際のパターン寸法を使って、カメラの内部パラメータ(焦点距離や光学中心)や歪み係数を計算します。
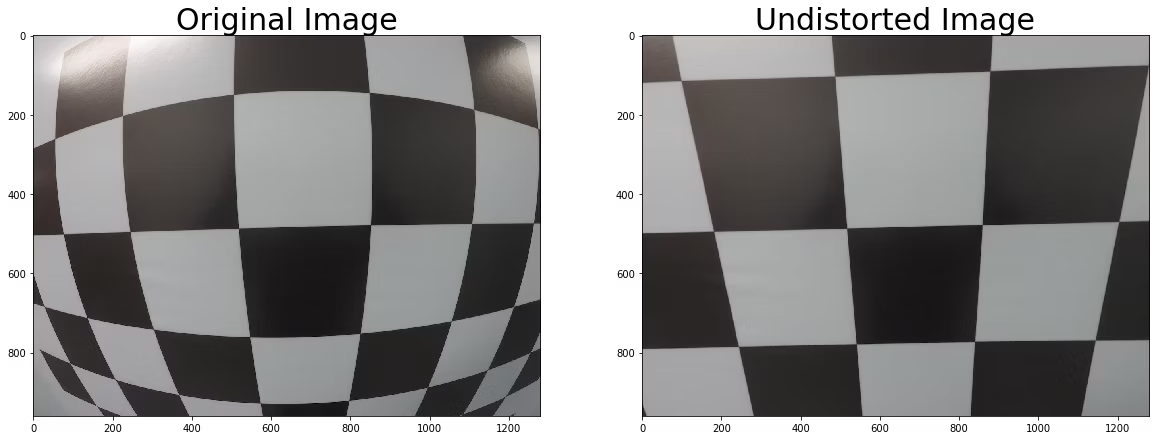
最後に補正パラメータを用いて画像を補正し、歪みのない正確な映像が得られます。
初心者にもやさしくステップごとに図解で紹介している参考リンクはこちらです:
さらに詳しい図解やコード例も見られるので、実践したい方にもおすすめです!
なぜキャリブレーションが必要なのか?その理由とは
カメラキャリブレーションが必要な理由は、撮影された画像の歪みを補正し、正確な3D情報を取得するためです。
レンズの特性や製造誤差により、画像には歪みが生じます。
これを補正しないと、物体の位置や距離の測定に誤差が生じ、特に自動運転やロボットビジョン、AR/VRなどの分野で致命的な影響を及ぼします。
キャリブレーションにより、カメラの内部パラメータ(焦点距離、光学中心、歪み係数)や外部パラメータ(位置と姿勢)を正確に求めることで、画像と実世界の座標系を一致させ、精度の高い解析や制御が可能になります。
カメラのキャリブレーションと歪み補正の実践的アプローチ
カメラキャリブレーションを現場で活用するには、理論だけでなく実装力も必要です。
ここでは代表的な手法やツール、歪み補正との関係を具体的に解説します。
- Zhangの手法で行う
- 歪み補正とキャリブレーションの関係性を解説
- Pythonを使った実装方法
- チェッカーボードを使う理由とそのメリット
Zhangの手法で行う
Zhangの手法は、カメラキャリブレーションにおいて広く使用されている柔軟で実用的な方法です。
この手法では、既知の平面パターン(通常はチェッカーボード)を異なる角度や位置から撮影し、各画像からホモグラフィ行列を推定します。
これらのホモグラフィ行列を解析することで、カメラの内部パラメータ(焦点距離、主点、歪み係数)および外部パラメータ(位置と姿勢)を求めることができます。
Zhangの手法は、特別な装置や精密な配置を必要とせず、一般的なカメラと印刷されたパターンを用いるだけで高精度なキャリブレーションが可能であるため、研究や産業分野で広く採用されています。
歪み補正とキャリブレーションの関係性を解説
カメラキャリブレーションは、レンズによる画像の歪みを補正し、正確な画像解析を可能にする重要なプロセスです。レンズの特性や製造誤差により、撮影された画像には歪みが生じます。
この歪みを補正しないまま画像解析を行うと、物体の位置や距離の測定に誤差が生じ、特に自動運転やロボットビジョン、AR/VRなどの分野で致命的な影響を及ぼします。
キャリブレーションにより、カメラの内部パラメータ(焦点距離、光学中心、歪み係数)や外部パラメータ(位置と姿勢)を正確に求めることで、画像と実世界の座標系を一致させ、精度の高い解析や制御が可能になります。
Pythonを使った実装方法
Pythonを使った実装方法
PythonとOpenCVを用いたカメラキャリブレーションの基本的な手順は以下の通りです。
- チェスボード画像の準備
既知のサイズのチェスボードパターンを印刷し、カメラで異なる角度や距離から複数枚撮影します。 - コーナーの検出
撮影した画像から、cv2.findChessboardCorners()関数を使用してチェスボードのコーナーを検出します。 - コーナーの精緻化
検出されたコーナーをcv2.cornerSubPix()関数で精緻化し、より正確な位置を求めます。 - キャリブレーションの実行
cv2.calibrateCamera()関数を使用して、カメラの内部パラメータ(焦点距離、主点、歪み係数)および外部パラメータ(位置と姿勢)を推定します。 - 歪みの補正
得られたパラメータを用いて、cv2.undistort()関数またはcv2.initUndistortRectifyMap()とcv2.remap()関数を使用して画像の歪みを補正します。 - パラメータの保存
np.savez()やnp.savetxt()関数を使用して、推定されたパラメータを保存し、後の処理で再利用できるようにします。
これらの手順を適切に実行することで、カメラの特性を正確に把握し、画像の歪みを補正することが可能となります。
詳細な実装例やコードについては、以下のリソースが参考になります:
これらのリソースでは、キャリブレーションの理論から実践的な手法まで詳しく解説されています。
チェッカーボードを使う理由とそのメリット
チェッカーボードは、白と黒の正方形が交互に並んだパターンで、各交点(コーナー)が明確に識別できるため、特徴点の検出が容易です。
この明瞭なコーナーは、OpenCVなどのライブラリで自動的に検出でき、キャリブレーションの精度を高めます。
また、チェッカーボードの構造はシンプルで、印刷して簡単に作成できるため、特別な装置を必要とせず、低コストで利用可能です。
さらに、チェッカーボードのパターンは、カメラの内部パラメータ(焦点距離、光学中心、歪み係数)や外部パラメータ(位置と姿勢)を正確に推定するための理想的なターゲットとして機能します。
これらの特性により、チェッカーボードはカメラキャリブレーションの標準的な手法として広く採用されています。
まとめ:カメラのキャリブレーション
カメラのキャリブレーションは、画像の歪みを補正し、現実世界の正確な再現を可能にする重要なプロセスです。
特に、ARやロボットビジョン、3Dスキャンといった分野では、キャリブレーションなしでは精度の高い解析が困難です。
初心者でも実践できるよう、この記事では基本から実装まで一歩ずつ丁寧に解説しました。
キャリブレーションによって可能になるのは以下のような精度向上です:
- レンズの歪みによる誤差の補正
- 実世界との座標一致による高精度な測定
- 複数カメラの視点統合と画像の一致
- 実務レベルで使えるPythonとOpenCVの実装手順
また、Zhangの手法やチェッカーボードの使い方など、現場で役立つ知識も紹介しています。
「キャリブレーションって難しそう…」と感じていた方も、この記事を通じてその必要性と実行方法を理解し、すぐに活用できるようになります。
カメラのキャリブレーションは、単なる準備作業ではなく、あらゆる画像処理の基礎となる技術です。
正確な映像を得たいすべての人にとって、今こそ学んでおきたい重要なステップです。